研究内容
01
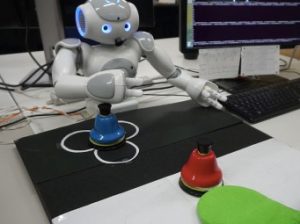
認知ロボティクス
Murata et al., IEEE Trans. Auton. Ment. Dev., 2013.

Murata et al., Adv. Rob., 2014.

Murata et al., IEEE Trans. Neural Networks Learn. Syst., 2017.
連続的な感覚・運動経験を学習し構造化することで獲得される,知覚・行動・注意といった人間の認知機能を実現する計算メカニズムの構成論的理解を目指しています.認知神経科学や発達心理学等の研究分野における実験・仮説的な知見を参考に理論を構築し,計算モデルを開発することでその理論をシステムとして具現化します.そして,具現化されたシステムをロボットに搭載し,学習実験を行うことで理論の検証を行います.当研究室では特に,脳の計算原理・理論として自由エネルギー原理や予測符号化といった予測情報処理に着目しています.また,計算モデルの構築にはニューラルネットワーク(深層学習技術)を用いています.これまでの研究では,観測情報の不確実性の推定を考慮したStochastic Continuous-Time Recurrent Neural Network(S-CTRNN)や神経活動に異なる時間スケールを導入したStochastic Multiple Timescale RNN(S-MTRNN)といった再帰型神経回路モデル(RNN)を提案してきました.また研究対象として扱ってきた認知機能の例として,リーチング・模倣・自他分離・言語・コミュニケーション等が挙げられます.
今後はこれまでに行なってきたロボットを用いた研究を発展させることに加え,認知神経科学や意識科学の研究者とより強く連携することで,例えば霊長類の全脳皮質脳波の深層学習技術による解析や意識の統合情報理論等にも取り組んでいき,構成論的アプローチと分析的アプローチの両方向から認知機能・知能の理解を目指していきたいと考えています.
今後はこれまでに行なってきたロボットを用いた研究を発展させることに加え,認知神経科学や意識科学の研究者とより強く連携することで,例えば霊長類の全脳皮質脳波の深層学習技術による解析や意識の統合情報理論等にも取り組んでいき,構成論的アプローチと分析的アプローチの両方向から認知機能・知能の理解を目指していきたいと考えています.
02
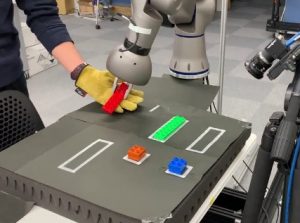
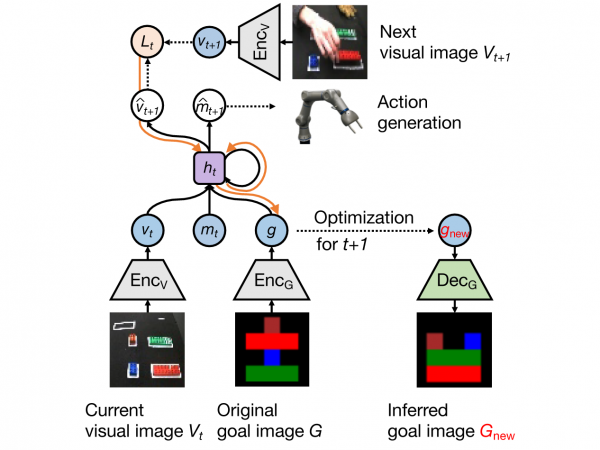
ロボット学習
Murata et al., IEEE Trans. Cognit. Dev. Syst., 2018.
Murata et al., ICONIP, 2019.
Murata et al., ICONIP, 2019.

WidowX 250 Robot Arm 6DOF.
認知ロボティクスの研究を発展させることで,他者(人間やロボット)との協調が可能な知能ロボットの実現を目指しています.例えば工場内での生産ラインのように特定の用途に利用する産業用ロボットであれば,起こりうる状況を事前に想定し,そのためのプログラムを組み込んで稼働させれば問題ありません.しかし,私たちの日常生活環境において人と共に働いたり人をサポートしたりするような知能ロボットの実現のためには,文脈に依存した複雑かつ柔軟な行動生成や不確実な環境下における適応的な判断といった技術的課題を解決する必要があります.前述のような起こりうる状況の事前の想定は現実的に不可能であるため,ロボットが自らの感覚・運動の経験を学習し汎化することで必要な機能を獲得する仕組みが鍵となります.当研究室では特に,その機能の背後にある原理として予測情報処理に着目し,ロボットの知能化技術を開発しています.これまでの研究例として,人とロボットによる協調組み立て作業の実現・人の行動計画の動的推定・ロボット自身の行動計画の修正等が挙げられます.
本分野においては,効率的な学習データの取得方法・学習方法の確立が重要であると考えられます.そのため今後はロボットに好奇心や内発的動機の仕組みを導入することやプレイデータを用いた自己教師あり学習等に取り組んでいきたいと考えています.
本分野においては,効率的な学習データの取得方法・学習方法の確立が重要であると考えられます.そのため今後はロボットに好奇心や内発的動機の仕組みを導入することやプレイデータを用いた自己教師あり学習等に取り組んでいきたいと考えています.
03
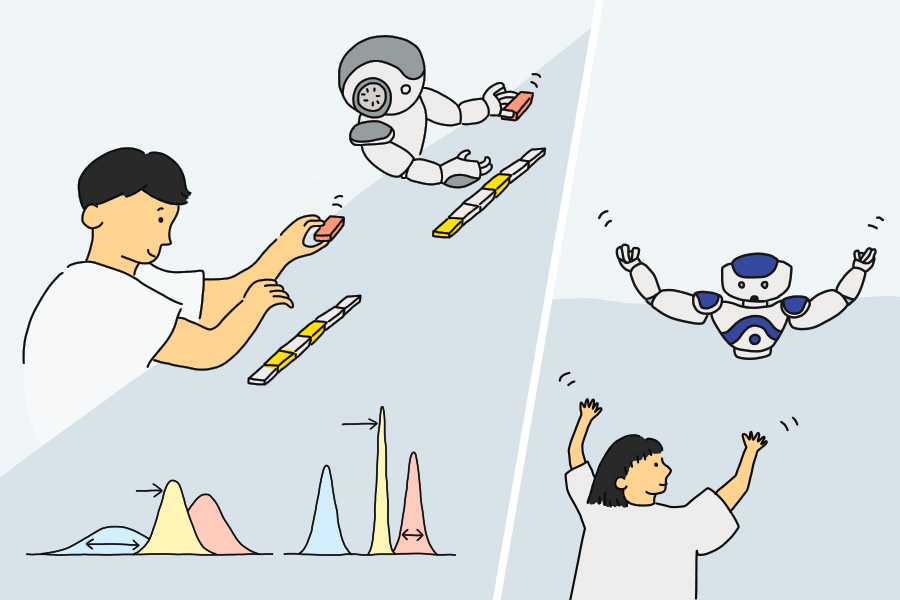
計算論的精神医学
Idei, Murata et al., Comput. Psychiatry, 2018.
Murata et al., IEEE ICDL-EpiRob, 2019.
Murata et al., IEEE SMC, 2019.

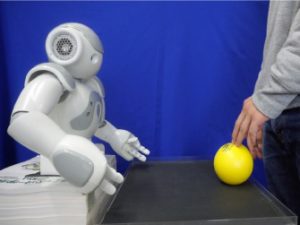
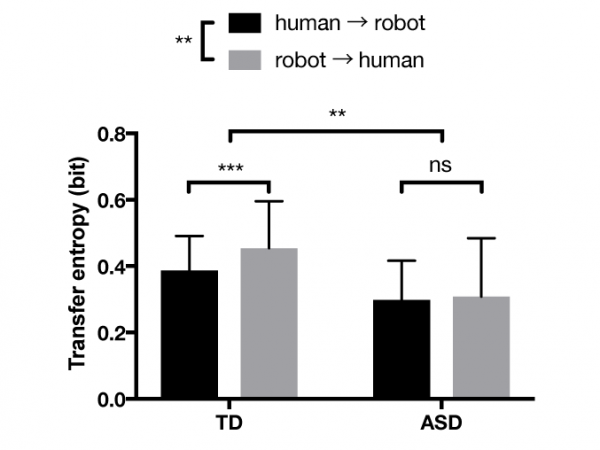
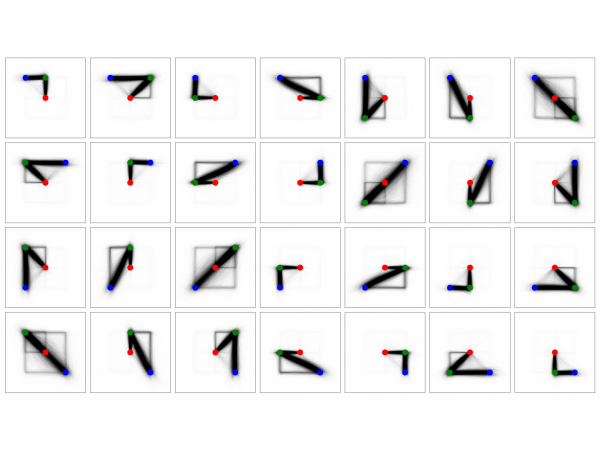
認知ロボティクスの研究を発展させることで,自閉スペクトラム症や統合失調症等の精神障害をもたらす計算メカニズムの構成論的理解を目指しています.計算論的精神医学は精神医学の新しい分野ですが,近年その重要性が世界的に注目されています.当研究室では特に,予測符号化の失調として精神障害を理解することを目指しています.また,計算モデルとロボットを組み合わせた構成論的アプローチに加え,実際の人を対象とした研究も行なっています.具体的には,RNNによって駆動されるロボットと実験参加者の間の模倣相互作用実験を通して,定型発達者と自閉スペクトラム症者の認知行動様式の違いを抽出することに成功しました.さらに近年は,ロボットを用いた研究のみならず,クラウドソーシングを用いた大規模Web実験によって1000人規模の描画行動データと多尺度発達・精神障害傾向データを取得し,描画様式と発達・精神障害傾向の関係性の分析を行なっています.また,描画行動データを深層生成モデルで学習することで描画エージェントを構築し,人との描画相互作用実験を行う予定です.
認知ロボティクスの研究と同様に,今後も精神医学・認知神経科学・心理学といった関連分野の研究者と連携し,ロボットを用いた構成論的アプローチに加え,実際の人を対象とした分析的アプローチの両方向から精神障害の理解を目指していきたいと考えています.
認知ロボティクスの研究と同様に,今後も精神医学・認知神経科学・心理学といった関連分野の研究者と連携し,ロボットを用いた構成論的アプローチに加え,実際の人を対象とした分析的アプローチの両方向から精神障害の理解を目指していきたいと考えています.